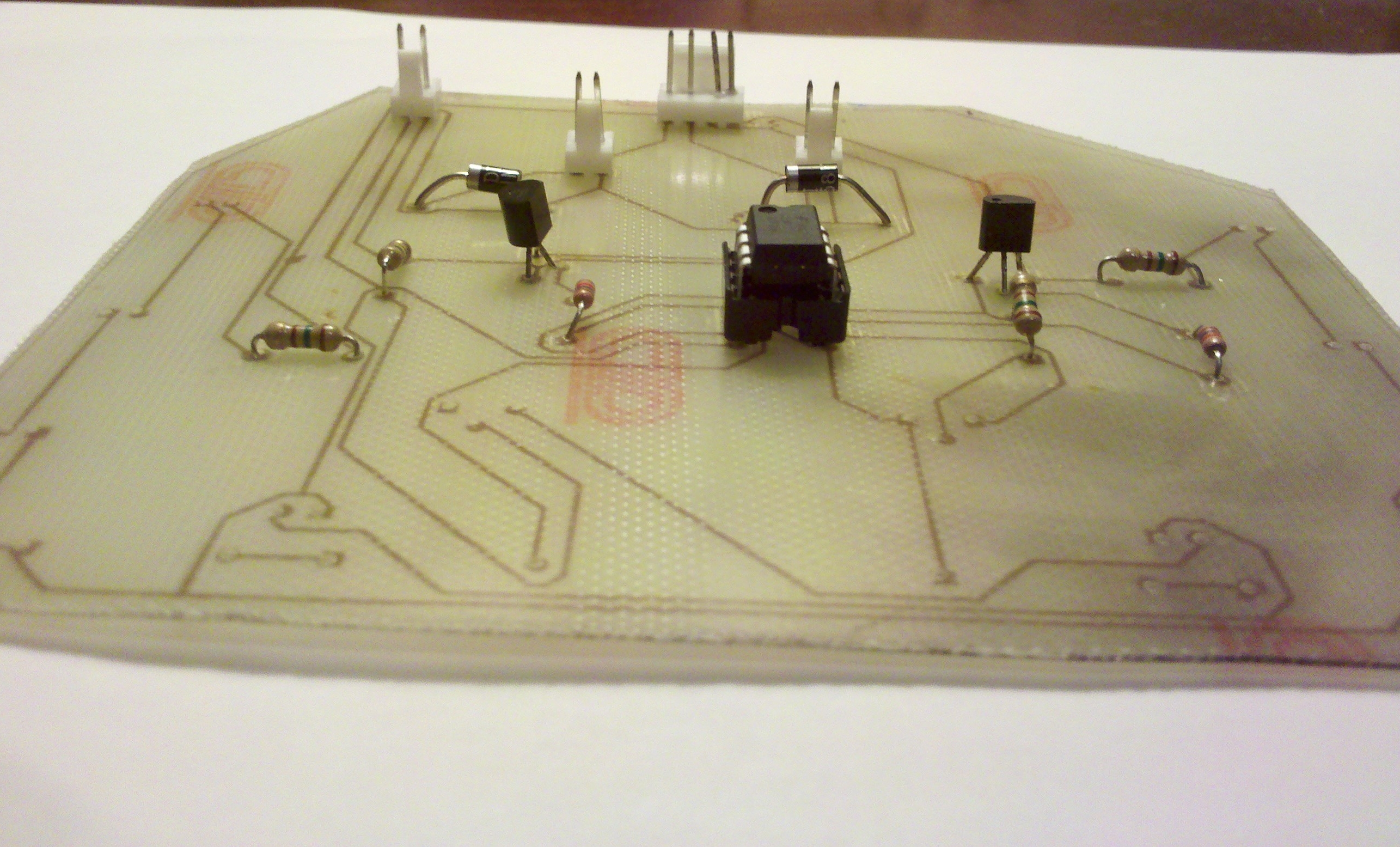
My line following robot is another step closer to being completed. I finished soldering all of the components and connected the battery to test the circuit. The next and hopefully last steps are to attach the circuit board and motors to the body.

Be a part of a hacker/builder community where ideas are shared, innovation is fostered and the maker experience is hands-on.
Join us Tour the SpaceMy line following robot is another step closer to being completed. I finished soldering all of the components and connected the battery to test the circuit. The next and hopefully last steps are to attach the circuit board and motors to the body.
Today I stopped by the makerspace to etch the circuit board for my second robot. The robot is a very simple line follower that uses a LM393 dual comparator IC. The complete design and build instructions can be found in the book Robot Building for Beginners by David Cook.
I attended DrawCamp today, and though I did miss out on CNC Day at the Makerspace, I talked to a few folks who might just be makers.
While at the Camp, I didn’t actually draw anything myself, but I had the Egg-Bot and my Friday Night Drawbot on hand both doing a bit drawing. (Oh, I also rebuilt the Drawbot for the 3rd time, this time making things much more solid, switching to a Diavolino, and adding a shield for easy/solid connections to the servos.)
I also had the Make-A-Sketch (my Arduino/Processing-powered take on an Etch-A-Sketch) there, and invited people to make some sketches, which get uploaded to sketch.rasterweb.net
Many of the people on-hand weren’t familiar with electronics or robotics at all, but thought the art robots were “totally cool” and a few people knew about Arduinos or motion control. My favorite moment was when an illustrator looked at the Egg-Bot and then told me she was really interested in CNC Routers. (Hey, what do you know? We have one of those at the Makerspace!)
You never know where you might meet some makers at. :)
Greetings!
Hi, I’m David and this is my first post on the Milwaukee Makerspace site. I’m a video producer by trade, so you’ll be soon seeing some videos from some of my projects, however if you’re on the site you might have already seen some of my work. In late March I put together some videos of the Makers talking about what they make and what they think the Milwaukee Makerspace is.
Anyway, I didn’t even know what a Makerspace was myself till my friend Matt wrote me an e-mail and said, “If you want to walk the walk, come down to the Milwaukee Makerspace.” Needless to say I had no idea what that meant, but as soon as I stepped foot in our beautiful space with the warm welcoming logo above the hangar, I figured it out pretty quickly.
I have never done any robotics or electronics in my life, but seeing what the makers was up to inspired me. I picked up a soldering iron and started small. I’m the kind of Maker that works their way up to the big projects. Initially my ideas for projects mostly relate to my profession of video production. I would like to make a low to the ground camera platform, for wide angle shots, and a flying rig for some limited ariels. One thing at a time though, first I have to make something that works.
Introducing… JunkBot 1.0!!!

JunkBot 1.0 is my first attempt at what I want for a ground based camera platform. It sorta kinda does everything i want it to, but isn’t very robust. It’s functions are:
– Moves forward, back, turns using tank style steering
– Has a pan tilt camera mount
– Can wirelessly transmit video from the bot to a ground station
– Is controlled via a standard RC controller
– Falls apart slowly after about 15 feet of travel
My build process was:
1. Find plastic platform and half project box at the Makerspace “Hack Rack”
2. Get 2 continuous rotation servos & wheels. (Parallax servos sold at Adafruit)
3. Get an RC controller I am happy with (Futaba 7C 2.4ghz)
4. Get 2 servos and mounts for the pan tilt functions of the camera mount
5. Get 900mhz wireless video transmitter (RangeVideo)
6. Make front tire out of foam and a coat hanger
7. Strapped it all together with Velcro (TM).
I used my GoPro camera because it’s small, light, and gets
the job done. I really love those cameras.
I got to show JunkBot 1.0 at the Makerspace Grand Opening and I think it went rather well. Next up I need to make some improvements:
– Better platform
– Better pan tilt
– Better propulsion
– Make it out of quality materials
– Add in some autonomous functions
But, you have to start somewhere, right? So we’ll see how this all goes. JunkBot 2.0 here I come!
Thanks for reading,
David
It’s been one month since our Grand Opening. We’ve added a few new members and some new equipment! Here’s a quick trip around the shop to see what’s going on:

|
Brent and Jackie are building a vacuum forming machine to mold plastic. |
| David has a quad copter kit he’s building that when done will be able to lift 1.1 kilograms! |

|

|
|
| Kevin and friends spent time welding metal to a bicycle wheel as part of an joke gift sculpture. |
|

